1 Introducción
En su programa de televisión junto a Antonio Carrizo, el personaje de “El Contra” le pregunta a un invitado DT:
— Supongamos que van 45’ del segundo tiempo y su equipo está atacando. ¿Qué prefiere? ¿Que le den un córner o un lateral?
— ¿Qué pregunta es esa? Un córner, porque tengo una chance de llegar al área.
— Con el lateral también. Nosotros allá en Villa Dálmine, durante la semana entrenamos laterales con sandías. Cuando llega el domingo, (lo mira a Antonio Carrizo) ¿sabés hasta dónde tiramos la pelota?Juan Carlos Calabró, 1993
Lo que yo daba por obvio dejó de serlo de un día para otro, concretando un choque que —debo admitir— ha vuelto a sucederme muchas veces desde entonces. Si hoy no me detengo a pensar un momento, vivo convencido de que todo el mundo es ingeniero nuclear o doctor en física.
Germán Theler, La Singularidad, 2006
En los congresos académicos sobre métodos numéricos y aplicaciones, muchas veces uno puede ver un esquema similar al siguiente:
- Se muestra el estado del arte y se describen las falencias de un cierto algoritmo tradicional.
- Se propone una nueva idea o metodología para mejorar dicho estado del arte.
- Se aplican las novedades a un caso sencillo donde, efectivamente, la eficiencia o la precisión mejoran sensiblemente.
- Se indica que los próximos pasos serán resolver no ya problemas canónicos sino problemas de interés industrial.
Pero también muchas veces, el nuevo desarrollo nunca llega efectivamente a la industria. El ímpetu de la investigación se va difundiendo a lo ancho de nuevas asignaciones de fondos de investigación que se enfocan en otras áreas, de gente que cambia de ideas, se jubila, etc. Las aplicaciones quedan en una lista de tareas “por hacer” (TO-DOs).
Los proyectos de ingeniería industriales están indefectiblemente restringidos por los tres vértices del triángulo de gerenciamiento de proyectos costos-alcance-calidad. Cualquier tarea de tipo de I+D+i en temas de modelado numérico debe necesariamente
- Ser pagada por el cliente.
- Ser aprobada por el cliente (o por quien el cliente designe, incluyendo agencias de regulación).
- Ser gerenciada de forma tal que los costos sean menores a los precios de venta.
Durante el desarrollo de este tipo de proyectos se suelen identificar muchas ideas y tareas que podrían llevarse a cabo para generar nuevas oportunidades técnicas y comerciales. Pero la mayoría de las veces vienen nuevos proyectos con clientes diferentes y necesidades ortogonales. Las ideas quedan en una lista de TO-DOs.
En el ambiente de emprendedurismo, hay start ups relacionadas a temas de modelado numéricos de fenómenos complejos con interés en ingeniería. A menos que los fundadores tengan habilidades excepcionales como las de Henry Ford que en lugar de desarrollar “caballos más rápidos” creó una industria global desde cero, los casos de éxito están relacionados a tecnologías no muy disruptivas en sí mismas que termina en una adquisición por parte de una gran compañía existente, con sus inercias e idiosincrasias corporativas. Más aún, en el ámbito nuclear las regulaciones y la financiación de nuevas instalaciones es tan complicada que necesariamente deben involucrarse entidades oficiales que complican mucho más aún la dinámica característica de las start-ups. El ímpetu se va difundiendo en organigramas rígidos poco amenos a la innovación. La mayoría de las ideas quedan en una lista de TO-DOs.
Habiendo explorado profesionalmente con bastante detalle cada uno de estos tres puntos durante los últimos quince años, he decido escribir esta tesis de doctorado en forma atípica y excepcional—en el sentido de “excepción”. Empezando por mi edad al momento de entregar y defender esta tesis y siguiendo por la forma de encarar los trabajos (como por ejemplo el propuesto en la presentación [12]). Los desarrollos aquí descriptos han sido claramente inspirados por estos tres puntos, pero fueron realizados en forma completamente independiente de estos tres ámbitos. Es esta una tesis escrita durante los fines de semana por un profesional de la industria del software de cálculo numérico sin los condicionamientos particulares de la academia, la industria ni el emprendedurismo. Representa entonces, una manera de poder evaluar—dentro de las capacidades y responsabilidades que me atañen—la diferencia entre lo urgente y lo importante como propone Mafalda (figura 1.1).

El objetivo principal es entonces sentar las bases para que las tareas identificadas como potenciales generadoras de nuevas oportunidades técnicas y comerciales, mencionadas explícitamente en la Sección 6.1, no queden solamente en una lista de puntos “nice to have”.
El contenido general de esta tesis es una mezcla de
- física de neutrones y reactores a nivel de núcleo
- programación en computación de alto rendimiento
que son justamente las dos mitades del título y los temas profesionales en los que me desempeñé en la academia, en la industria y en el mundo del emprendedurismo. Este contenido está distribuido en seis capítulos, incluido este, ordenados según el orden de presentación “por qué”, “cómo” y “qué”:
- ¿Por qué?
- Capítulo 1: Introducción
- ¿Cómo?
- Capítulo 2: Transporte y difusión de neutrones
- Capítulo 3: Esquemas de discretización numérica
- ¿Qué?
- Capítulo 4: Implementación computacional
- Capítulo 5: Resultados
Debo reconocer que la extensión de esta tesis es mayor que la que me hubiese gustado que tenga. Pero también es cierto que he necesitado escribir todo este texto (y ecuaciones) ya que de esta forma he podido entender y procesar toda la información necesaria para hacer aportes originales a mis cuarenta años. El primer capítulo (why) contiene apreciaciones un tanto subjetivas pero basadas en experiencia sólida. Los siguientes dos capítulos (how) contienen desarrollos matemáticos harto conocidos pero, como allí se menciona, funcionan como una amalgama uniforme de varias fuentes de forma tal de generar una base teórica del desarrollo en sí mismo, y de permitirme “digerir” el cuerpo teórico detrás de los métodos numéricos relacionados al transporte de neutrones a nivel de núcleo. Los últimos dos capítulos (what) contienen el núcleo de la contribución original.
1.1 Cien años de programación
Durante mi paso por la industria nuclear en el completamiento de la Central Nuclear Atucha II (el punto 2 ) he tenido la experiencia de emplear herramientas computacionales de cálculo neutrónico, termohidráulico y de control [15]. Por razones que no viene al caso analizar, aún en la década de 2010, mucho del software empleado había sido diseñado originalmente varias décadas antes cuando los paradigmas computacionales eran radicalmente diferentes. Por ejemplo, la tabla 1.1 muestra un punto central de este paradigma: el costo de la hora de CPU de las computadoras usualmente utilizadas para cálculos nucleares en 1965 [20].
| Computer | Monthly Rental | Relative Speed | First Delivery |
|---|---|---|---|
| CDC 3800 | $ 50,000 | 1 | Jan 66 |
| CDC 6600 | $ 80,000 | 6 | Sep 64 |
| CDC 6800 | $ 85,000 | 20 | Jul 67 |
| GE 635 | $ 55,000 | 1 | Nov 64 |
| IBM 360/62 | $ 58,000 | 1 | Nov 65 |
| IBM 360/70 | $ 80,000 | 2 | Nov 65 |
| IBM 360/92 | $ 142,000 | 20 | Nov 66 |
| PHILCO 213 | $ 78,000 | 2 | Sep 65 |
| UNIVAC 1108 | $ 45,000 | 2 | Aug 65 |
Tabla 1.1: Tabla “Las nuevas computadoras de alta velocidad de 1965” de la referencia [20]. Los costos están expresados en dólares americanos de 1965 y pueden variar en un factor de dos. Un dólar de 1965 equivale a USD 10 de 2024.
Cuando el sistema operativo Unix fue introducido a principios de la década de 1970 [8], los diseñadores ya habían previsto un gran descenso en los costos del hardware y un corrimiento de costos de CPU a ingeniería. De hecho una de las 17 reglas de la filosofía de Unix en las que se basa largamente el diseño de la herramienta computacional objeto de esta tesis (Apéndice C) se denomina “Regla de Economía” que indica que el software debe ser diseñado pensando en que el tiempo de la persona que usa el programa es mucho más valioso que el del hardware que lo ejecuta. Hoy en día, alquilar una hora de CPU de una computadora razonablemente rápida y con suficiente memoria para realizar cálculos nucleares estándar sale menos de 0,15 USD. Un servidor con 16Gb de RAM disponible 100% del tiempo se puede conseguir por veinte dólares al mes.
La forma de diseñar software de cálculo hoy en día debe ser, entonces, radicalmente diferente a la usada media docena de décadas atrás. En el capítulo 4 discutimos en detalle todas estas particularidades, pero el ejemplo clásico se reduce a aquellos programas de cálculo (sobretodo termohidráulicos) en los que la salida está compuesta exactamente por todos y cada una de los resultados calculados, incluyendo distribuciones espaciales y temporales. Esta decisión de diseño tiene sentido cuando es muy caro tener que volver a realizar un cálculo porque un cierto valor requerido no forma parte de la salida. Pero esto implica que el ingeniero a cargo del cálculo debe buscar y filtrar solamente aquellos resultados necesarios en medio de un pajar de información a un costo horario miles de veces superior a tener que volver a realizar el cálculo pidiendo explícitamente el resultado requerido, y nada más.
El diseño del sistema operativo Unix (y del lenguaje de programación C, estrechamente relacionado) ha dado en el clavo en muchos aspectos técnicos que hacen que su tecnología esté vigente como nunca más de cincuenta años después de las decisiones de diseño. Tanto es así que prácticamente todos los servidores públicos de Internet funcionan sobre alguna variante de este diseño. Más aún, la arquitectura es tan sólida que aunque en las décadas de 1990 y 2000 hayan aparecido muchas herramientas de cálculo basadas en Windows (la invasión del “X for Windows” que, en mi humilde opinión, ha sido perjudicial para la salud de la comunidad de la mecánica computacional), se ha probado que es técnica y económicamente mucho más eficiente recurrir a un esquema de alquiler de recursos computacionales (la nube pública) en lugar de recurrir a comprar y mantener servidores propios (on premise). Desde el punto de vista económico, lo segundo implica costos de capital mientras que lo primero son costos de operación. Desde el punto de vista técnico, no tiene ningún sentido comprar hardware cuyo nivel de utilización será menor al 100%. En terminología de start ups: “rent, don’t buy”.
En este sentido, la herramienta computacional de cálculo desarrollada desde cero en esta tesis para resolver ecuaciones diferenciales en derivadas parciales fue diseñada para ser ejecutada nativamente en la nube. Como explicamos en detalle en la Sección 4.4.6, haciendo un paralelismo con la nomenclatura de interfaces web donde hay diseños mobile friendly y mobile first, decimos que la herramienta es cloud first y no solamente cloud friendly.
A lo largo de otro paso profesional por el punto 2 en la industria de la consultoría y del desarrollo de software, aprendí que un esquema usual de contratación entre un cliente y un proveedor de software consiste en que el primero prepara un documento titulado “Software Requirements Specification” listando justamente los requerimientos técnicos que el software a comprar debe cumplir como una especie de pliego técnico particular. Entonces los potenciales proveedores preparan un documento de “Software Design Specification” en el que explican técnicamente cómo planean cumplir con los requerimientos. Una especie de oferta técnica al pliego. Teniendo en cuenta estas consideraciones (más la experiencia de los tres puntos del comienzo del capítulo), he decidido entonces organizar el diseño de una nueva herramienta partiendo primero de un SRS ficticio (pero plausible), pidiendo lo que me gustaría que una herramienta computacional cloud first cumpla. A partir de estos requerimientos, empecé a estudiar la forma de cumplirlos, implementarlos y documentarlos en un SDS. Ambos documentos forman parte de los apéndices de esta tesis (apéndices A y B).
Además del requerimiento de que la herramienta desarrollada corra en la nube, se requiere también que el software desarrollado sea libre y abierto. Este punto es de especial importancia tanto en la academia como en la industria (por diferentes razones en cada caso) y sus implicaciones son usualmente ignoradas, especialmente en la industria nuclear. En la Sección 4.4.1 explicamos las razones de dicha importancia.
Otra característica, explicada en detalle en el capítulo 4, es que la arquitectura del código fue diseñada en forma tal que sea extensible en el sentido de poder agregar nuevas formulaciones de ecuaciones a resolver en forma razonablemente sencilla sin necesidad de tener que escribir un nuevo solver para cada ecuación. La forma de implementar esta característica se basa en un esquema de apuntadores a función resueltos en tiempo de ejecución según el tipo de problema que se requiere resolver definido en el archivo de entrada.
Un requerimiento importante es que la herramienta sea escalable en paralelo para permitir resolver problemas relativamente grandes con discretizaciones relativamente finas. En forma abstracta, la idea de paralelización de un código de cálculo se suele asociar a la posibilidad de obtener resultados en forma más rápida que en el caso serie sin paralelizar ya que, en principio, al disponer de más unidades de procesamiento es posible realizar más operaciones de coma flotante por unidad de tiempo. Pero desde el punto de vista de esta tesis, el principal objetivo no es el tiempo de cálculo sino la cantidad de memoria necesaria para poder resolver un cierto problema, como explicamos a continuación. En forma particular, y sin entrar en detalles técnicos, existen esencialmente tres tipos de paralelismo [19]:
- Sistemas de memoria compartida (OpenMP)
-
múltiples unidades de procesamiento vinculadas a un único espacio de direcciones de memoria.
- Sistemas distribuidos (MPI)
-
múltiples unidades computacionales, cada una con sus unidades de procesamiento y memoria, conectadas entre sí a través de redes de alta velocidad.
- Unidades de procesamiento gráfico (GPU)
-
utilizadas como co-procesadores para resolver problemas numéricamente intensivos.
Tanto en el caso OpenMP como GPU, los threads que corren en paralelo comparten la memoria física de acceso aleatorio (RAM). Entonces mientras mayor sea el problema, más memoria se necesitará. Eventualmente, para algún cierto tamaño de problema crítico, se llegará a un límite de memoria que no se podrá franquear. Pero en el caso de MPI [3], como los procesos paralelos pueden estar en diferentes computadoras físicas (o no), la memoria total disponible se puede hacer arbitrariamente grande agregando nuevos hosts al sistema distribuido. En efecto, en el capítulo 5 mostramos que para un tamaño de problema fijo la memoria por proceso MPI disminuye monótonamente con la cantidad de procesos. Al combinar esta capacidad con el requerimiento de que la herramienta pueda correr en la nube, en principio se podrían resolver problemas de tamaño arbitrario si se pudieran alquilar suficientes instancias cloud.
Observación. La biblioteca PETSc [2], que es la que usa la herramienta desarrollada en esta tesis para resolver los problemas ralos que resultan de discretizar ecuaciones diferenciales en derivadas parciales, basa su esquema de paralelización en el paradigma MPI. Sus desarrolladores manifiestan expresamente—tanto en forma escrita a través de correos electrónicos como en forma oral en las reuniones anuales de usuarios [6]—que no hay ninguna razón técnica para preferir el paradigma OpenMP sobre el MPI. Si bien hay esfuerzos para soportar OpenMP en PETSc, éstos apuntan solamente a dar soporte a código existente para que pueda aprovechar las ventajas de PETSc. Los desarrolladores recomiendan diseñar código nuevo basando en MPI por sobre OpenMP.
Observación. Con respecto a GPU, PETSc provee interfaces para los SDKs más comunes (CUDA, HIP, SYCL, Kokkos, etc.) que pueden descargar1 operaciones de álgebra elemental en tiempo de ejecución con opciones de línea de comando. Una de las ventajas particulares de la filosofía Unix de hacer una sola cosa bien y re-utilizar las cosas que ya están bien hechas es que la herramienta desarrollada en esta tesis tiene soporte para GPU “gratis” aprovechando estas interfaces.
Combinando estos requerimientos del SRS (apéndice A) y la forma en la que se abordan desde el punto de vista del diseño en el SDS (apéndice B) e implementación (capítulo 4), considero que la contribución de esta tesis es original ya que no tengo conocimiento de la existencia de un software similar que cubra las mismas características requeridas. Tal vez existan algunas que cumplan un par de los requerimientos, o incluso alguna que cumpla una cierta fracción significativa. Pero ninguna el 100%. Esto es más notable aún teniendo en cuenta que el objeto principal de estudio de esta tesis es la neutrónica a nivel de núcleo, resuelta tanto con difusión como con ordenadas discretas sobre mallas no estructuradas. A modo de ejemplo de la clase de contribución que propongo, consideremos el Benchmark PWR 3D propuesto por la IAEA en 1976 [1]. La figura 1.2 muestra el resultado de haber resuelto el problema pero…



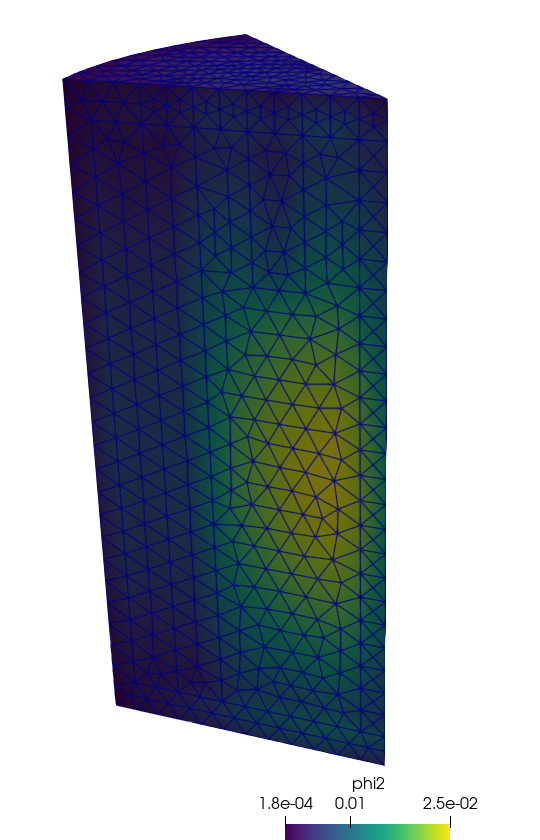
- con una simetría 1/8 en lugar de la simetría 1/4 original,
- con un reflector cilíndrico en lugar de un reflector compuesto por planos perpendiculares a los ejes cartesianos,
- resuelto con una formulación S_4 de ordenadas discretas en lugar de la original de difusión, y
- en paralelo utilizando cuatro procesos independientes.
Cada uno de estos cuatro puntos está detalladamente explicado en el cuerpo de la tesis y, junto con
- la capacidad de extender el área de los problemas a resolver agregando nuevas formulaciones de ecuaciones discretizadas con el método de elementos finitos (ver el apéndice B para ejemplos por fuera de la neutrónica de núcleo)
- el diseño cloud first que permite realizar lo que se conoce como “simulación programática” sin necesidad de interactuar
- la discretización del dominio utilizando mallas no estructuradas, potencialmente realizando descomposición de dominio
- la posibilidad de escalar en paralelo mediante y poder resolver problemas de tamaño arbitrario
constituyen el unfair advantage—en el sentido del canvas de modelo de negocios—de la herramienta desarrollada [18].
Pero es la combinación de todos ellos la que configura la propuesta de la tesis, minuciosamente explicada en la Sección 1.4: poder disponer de una herramienta computacional que permita resolver problemas de neutrónica a nivel de núcleo de tamaño arbitrario a través de la escalabilidad en paralelo basado en el estándar MPI. Lo importante es que, como mostramos en el capítulo 5, hacemos una descomposición del dominio y de “repartimos” la carga computacional—especialmente la memoria RAM que usualmente es el recurso limitante—en varios procesos. Esto hace posible resolver problemas formulados con S_N en mallas no estructuradas en principio de tamaño arbitrario y, eventualmente, poder compararlos con la aproximación de difusión que es computacionalmente mucho menos demandante. Para ello se necesita sobrepasar las limitaciones de las herramientas neutrónicas tradicionales (Sección 1.3), que es la idea central de esta tesis.
Observación. Este trabajo sólo se enfoca en el desarrollo de la herramienta necesaria para realizar la comparación. Un estudio cuantitativo de la eficiencia de diferentes esquemas numéricos para hacer ingeniería neutrónica de núcleo implicaría un proyecto de ingeniería de varios hombre-años más sus costos indirectos asociados. En la Sección 6.1 listamos algunos de los trabajos futuros que podría derivar de las bases sentadas en esta tesis.
Finalmente, a modo personal debo notar que en el Proyecto Integrador de mi Carerra de Ingeniería Nuclear traté temas de control en loops de convección natural caóticos [9] y en la Tesis de Maestría en Ingeniería traté temas de inestabilidades termohidráulicas en presencia de una fuente de potencia de origen neutrónico [10]. Poder realizar una tesis de doctorado en temas de neutrónica de nivel de núcleo me permite cerrar en forma académica el lazo termohidráulica-neutrónica-control, que fue también el eje de mi participación profesional en el completamiento de la Central Nuclear Atucha II.
1.2 Historia de dos reactores
El reactor de la Central Nuclear Atucha I fue puesto en condición crítica el 13 de enero de 1974, constituyendo así la primera planta de generación nucleoeléctrica instalada en América Latina. Es un reactor térmico de 357 MWe brutos, moderado por agua pesada con canales combustibles verticales refrigerados también por agua pesada a la misma presión que el moderador pero a diferente temperatura. Debido a que el combustible es uranio natural, la poca reactividad en exceso hace que el reactor deba tener un recambio de combustible continuo. Para ello existe una máquina de recambio que opera verticalmente sobre la tapa superior del reactor extrayendo elementos combustibles gastados e introduciendo frescos a un ritmo aproximado de uno por día. El resto del tiempo la máquina opera haciendo un mezclado2 para homogeneizar el quemado de los combustibles y optimizar el quemado de extracción final. Dado que la parte superior del recipiente de presión debe quedar libre para que trabaje la máquina de recambio, los mecanismos de control de reactividad tanto primarios (las barras de control) como secundarios (sistema de inyección de boro de emergencia) deben entrar el núcleo en forma oblicua a los canales combustibles, configurando un diseño esencialmente único en el mundo.
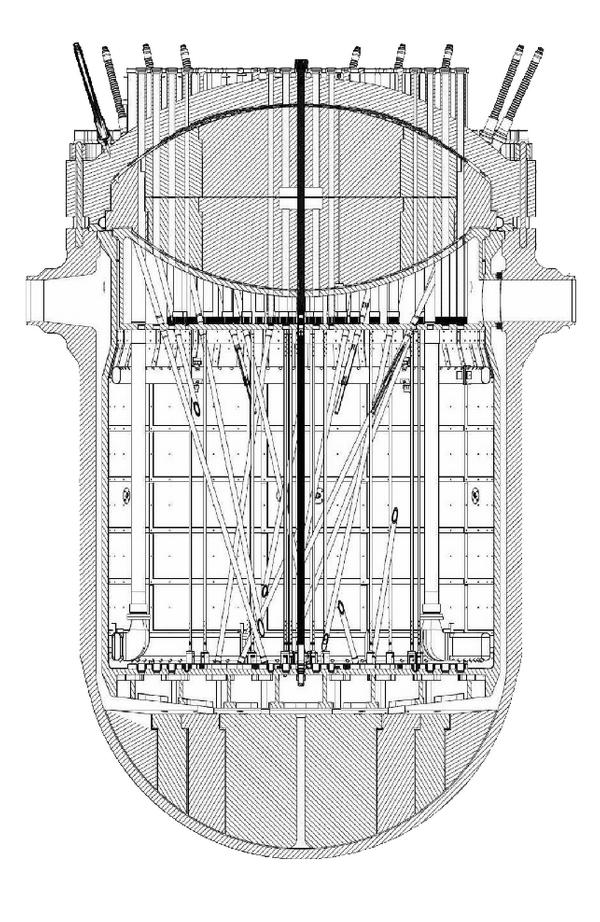
Atucha II tiene un diseño similar aunque genera más del doble de potencia, 745 MWe brutos. Debido a una combinación de causas que quedan fuera del alcance de cualquier análisis, el contrato de construcción se firmó en 1980 pero la obra no se terminó hasta 2014. Detalles más detalles menos, el diseño del reactor es similar al de Atucha I (figura 1.3).

1.2.1 Neutrones contantes y sonantes
El martes 3 de junio de 2014 a las 9:03 el núcleo3 de la Central Nuclear Atucha II logró mantener por primera vez una reacción nuclear de fisión en cadena autosostenida. Este suceso marcó un hito no sólo en la industria nuclear argentina sino también en mi carrera profesional. Durante cinco años y medio estuve trabajando desde TECNA S.A. junto a un equipo ingenieros de Nucleoeléctrica Argentina S.A. en el desarrollo de modelos y códigos de cálculo acoplados para predecir, estudiar y analizar el comportamiento de la central teniendo en cuenta neutrónica espacial, realimentaciones termohidráulicas y acciones del sistema de control, limitación y protección del reactor. Esa mañana pude presenciar de primera mano las indicaciones de los instrumentos que mostraban un incremento lineal en el tiempo de la señal de nivel de flujo neutrónico en el núcleo del reactor, que es lo que yo había leído en los libros de texto que debía suceder en un reactor crítico en presencia de una fuente independiente de neutrones. Para terminar de despejar cualquier clase de dudas (incluyendo físicas, tecnológicas e industriales), durante los siguientes meses continué dando soporte de ingeniería a las tareas de aumento escalonado de potencia hasta el cien por ciento, obteniendo evidencia experimental a prueba de escépticos de que realmente el reactor era capaz de generar potencia térmica a partir de la fisión del uranio mediante reacciones inducidas por neutrones.
1.2.2 Más de una rueda de auxilio
Aún cuando no son deseados, los imprevistos existen. Es por eso que todos nos aseguramos de que la rueda de auxilio de nuestro auto esté en condiciones antes de emprender un viaje más o menos largo ya que existe una probabilidad p_1 no nula de que se nos pinche una cubierta en el camino. ¿Pero por qué decimos la rueda de auxilio y no las ruedas de auxilio? ¿Acaso la probabilidad p_2 \approx p_1^2 de pinchar no una sino dos cubiertas en sucesos independientes no es también diferente de cero al fin y al cabo? Sí, claro, pero esa probabilidad p_2 \ll 1 es tan pequeña que no vale la pena el esfuerzo y el costo que implica llevar dos ruedas de auxilio en nuestro automóvil. Llegado el caso, llamamos a la grúa. En el diseño de centrales nucleares usamos un razonamiento similar: para todos los eventos cuyas probabilidades p_i de ocurrencia sean significativas (accidentes de base de diseño) debemos tomar precauciones; para el resto (accidentes fuera de la base de diseño), preparamos soluciones de contingencia.
En general, los reactores nucleares de potencia necesitan más de un único mecanismo de extinción de las reacciones de fisión. El primero consiste en las mismas barras de control, que son insertadas rápidamente dentro del núcleo para absorber neutrones y no permitir que las fisiones se auto-sostengan en el tiempo. Si bien la probabilidad de que este mecanismo falle es pequeña en términos absolutos, debemos incluir al menos un sistema más de extinción del reactor redundante, diverso e independiente. En el caso de las Centrales Nucleares tipo Atucha, el segundo sistema de extinción del reactor consiste en inyectar rápidamente una solución de ácido deuterobórico en el tanque del moderador. De esta forma, como los núcleos4 de ^{10}Bo son grandes absorbentes de neutrones, las reacciones de fisión se extinguen a medida que el boro ingresa a la zona del núcleo del reactor.
1.2.3 La conexión europea
Fue condición necesaria para la puesta a crítico de la central, la preparación del Informe Final de Seguridad (FSAR) y su presentación a la Autoridad Regulatoria Nuclear. Si bien la mayor parte de la ingeniería necesaria para su elaboración fue realizada en el país, debido a ciertas características del proyecto Atucha II—tanto técnicas como de gerenciamiento, con las que coincido completamente— para la evaluación de algunos aspectos relacionados al Capítulo 15 de Análisis de Accidentes fueron contratados consultores del exterior. En particular, el modelado de la actuación del sistema de inyección de boro de emergencia y su efecto sobre la neutrónica durante casos accidentales fue uno de estos aspectos. Por un lado, este estudio involucraba cierto know-how y técnicas que no estaban completamente desarrolladas en el país al momento de comenzar los trabajos de licenciamento de la central. Por otro lado, suele ser una buena práctica involucrar a grupos internacionales especializados, sobretodo en temas complejos, delicados y sensibles.
1.2.4 Aprendiendo de los que saben


A partir de la experiencia ganada desde la interacción con estos expertos y de las capacidades propias desarrolladas durante el proceso de licenciamento de Atucha II, que han servido incluso para que los consultores externos mejoren tanto sus propias capacidades como los resultados provistos, es que a comienzos de 2014 Nucleoeléctrica decidió que las tareas de actualización del Informe Final de Seguridad de la Central Nuclear Atucha I utilizando modelos, métodos y códigos según el estado del arte actual (i.e. los modelos, métodos y códigos usados para licenciar Atucha II) sean realizadas íntegramente en el país por ingenieros argentinos. En particular, la evaluación de la reactividad negativa insertada por el sistema de inyección de emergencia y de los efectos espaciales de la interacción neutrónica-termohidráulica durante accidentes recayó sobre nuestro equipo de trabajo, cuando anteriormente se habían contratado consultores europeos para realizar dichas tareas de ingeniería [14]. Durante 2014 hemos trabajado en el diseño de un esquema de cálculo acoplado basado en recursos de memoria compartida para permitir que durante el 2015 se realicen los estudios necesarios para analizar una treintena de accidentes de base de diseño que componen el Capítulo 15 del FSAR de la Central Nuclear Atucha I figura 1.4.
1.2.5 Claro como el agua pesada


En los reactores de agua pesada presurizada, si bien las funciones de refrigeración del combustible y moderación de los neutrones son realizadas por el mismo material (justamente agua pesada), las condiciones de temperatura a las que se encuentran refrigerante y moderador son diferentes. Incluso en ciertos diseños y/o condiciones operacionales, la presión puede ser diferente. Por lo tanto, desde el punto de vista neutrónico se deben considerar como materiales diferentes. El núcleo consiste en un arreglo periódico de canales refrigerantes con sus ejes paralelos entre sí. En los reactores tipo Atucha los canales se encuentran en forma vertical y con un arreglo sobre el plano transversal basado en triángulos equiláteros, mientras que éstos son horizontales y distribuidos como vértices de cuadrados en reactores tipo CANDU (figura 1.5). Los canales están inmersos en un gran tanque que contiene el moderador líquido, que usualmente se mantiene más frío que el refrigerante con el objetivo de mejorar la moderación y aumentar así el factor de multiplicación infinito k_\infty del núcleo. El elemento combustible está compuesto por un arreglo de 37 barras individuales que contienen las pastillas de dióxido de uranio recubiertas por un cladding de zircalloy.
En los reactores de agua pesada la parada rápida del reactor se realiza mediante la inserción de las barras de control por gravedad tal como en los reactores de agua liviana. Pero el segundo sistema de extinción consiste en la inyección rápida de una solución líquida absorbente de neutrones en el tanque del moderador, que es un componente único de este tipo de reactores. En particular, para el caso de Atucha I y II se emplea ácido deuterobórico.
1.2.6 Dos son compañía, tres son multitud
Podemos estudiar la mayoría de los casos que componen el Capítulo 15 “Análisis de accidentes” del FSAR utilizando cinética neutrónica puntual separando las contribuciones individuales \rho_x(t) debido al efecto x (barras de control, temperaturas, densidades, xenón, etc.) y luego sumándolas algebráicamente para obtener una reactividad total \rho(t). Sin embargo, en algunos casos tales como los accidentes con pérdida de refrigerante, es importante que consideremos efectos espaciales al presentarse una retroalimentación compleja debido tanto a las características termohidráulicas como neutrónicas de este tipo de reactores. Ambas situaciones son tenidas en cuenta en el esquema acoplado propuesto, que ilustramos en la figura 1.4. En él se involucra a un código de planta, a un modelo de la lógica de control y protección del reactor y a un código de cinética espacial capaz de incorporar distribuciones espacio-temporales de propiedades, en particular concentración de boro en el moderador, calculadas a partir de técnicas de dinámica de fluidos computacional,5 conocidas por sus siglas como CFD.
1.2.7 La gloriosa discretitud del alfabeto
El punto principal de esta tesis es que las herramientas de neutrónica de núcleo al final del día lo que hacen es utilizar computadores digitales para resolver ecuaciones diferenciales en derivadas parciales. Para ello es necesario discretizar el dominio espacial de la ecuación diferencial en derivadas parciales para obtener una cantidad finita de ecuaciones diferenciales ordinarias. La forma de discretizar el dominio depende de la formulación espacial discretizada. Los tres esquemas más comunes son
- diferencias finitas (FDM)
- volúmenes finitos (FVM)
- elementos finitos (FEM)
Dado un dominio espacial continuo (figura 1.6 (a)), esencialmente se puede proceder de dos maneras diferentes. O bien se superpone una grilla cartesiana (figura 1.6 (b)) y luego se ajusta el dominio a la grilla para obtener una malla estructurada (figura 1.6 (c)). O bien se aplican técnicas de mallado no estructurado para obtener una malla que permita representar la geometría original con mucha mayor precisión para la misma cantidad de entidades discretas (figura 1.6 (d)).




La principal diferencia técnica entre estas dos clases de mallas reside en que en el primer caso la topología se da implícitamente con una cantidad mínima de información, como por ejemplo número de celdas en cada dirección cartesiana o un vector de tamaños de celdas en cada dirección si la malla no es uniforme. En cambio, en el caso de mallas no estructuradas es necesario dar una lista explícita y completa indicando qué nodos definen qué celdas para poder obtener la topología y saber, por ejemplo, cómo es la conectividad de las celdas. Una forma eficiente de proveer esta conectividad es construir un grafo dirigido acíclico6 (DAG) [2], [5].
La mayoría de las herramientas de neutrónica a nivel de núcleo utilizadas en la industria nuclear mundial soportan solamente mallas estructuradas figura 1.7. En particular, todas las herramientas de neutrónica a nivel de núcleo empleadas en el análisis de seguridad de reactores tipo Atucha utilizan mallas estructuradas para resolver la ecuación de difusión de neutrones. Por lo tanto, cuando hablemos de neutrónica en lo que resta del capítulo solamente aparecerán mallas estructuradas hasta que discutamos las propuestas de esta tesis de doctorado en la Sección 1.4.
1.2.8 Multi-física multi-escala
En cualquiera de los dos casos ilustrados en la figura 1.4 para la evaluación de la neutrónica asociada a la actuación del sistema de inyección de boro de emergencia, el código neutrónico resuelve la ecuación de difusión de neutrones en el núcleo con secciones eficaces macroscópicas homogeneizadas espacialmente a nivel de canal refrigerante individual y condensadas a dos grupos de energía. Es decir, la celda unitaria que se resuelve en el nivel de cálculo de celda en el esquema multi-escala usual (Sección 2.5) contiene un canal refrigerante con las barras que componen el elemento combustible y una porción de moderador asociada a dicho canal (figura 1.8).

El código de núcleo trabaja con dos mallas (o retículas según la nomenclatura propuesta por el autor original del código), ambas completamente estructuradas: una de representación y una de cálculo como ilustramos en la figura 1.7. En la primera es donde se definen las secciones eficaces macroscópicas que dependen de las propiedades medias de la celda: quemado y temperatura de combustible, temperaturas y densidades de moderador y refrigerante, concentración de boro en moderador y refrigerante, concentración de xenón 135 en el combustible, etc. En la segunda, que es una subdivisión de la primera, es donde se resuelve numéricamente la ecuación de difusión de neutrones a partir de las secciones eficaces definidas sobre la malla de representación.
Para el caso particular de Atucha I, en la malla de representación se define la ubicación espacial de los 253 canales. La malla de cálculo resulta de dividir sobre el plano x-y el rectángulo asociado a cada celda en n\times n rectángulos más pequeños (por la geometría del arreglo de canales n debe ser una potencia de dos) y la longitud activa h del núcleo en una cantidad m de celdas axiales. En el equipo de trabajo entonces se dice que un cálculo se realiza con una malla de 2\times 2 \times 20, 4\times 4 \times 80, etc. La figura 1.7 (b) muestra una malla de cálculo de 4 \times 4 \times 20.


1.2.9 Dos por uno en D_2O
Durante la interacción con los consultores extranjeros en la etapa de evaluación de la inyección de boro en Atucha II hemos identificado que una discretización espacial gruesa tiende a sobrestimar la reactividad negativa introducida de forma inaceptable debido al efecto de dilución de secciones eficaces que repasamos en el capítulo de resultados (ver Sección 5.6). En efecto, consideremos una pequeña gota de ácido deuterobórico con una gran concentración de boro, digamos 2000 partes por millón, que en algún instante se encuentra dentro de una de las celdas sobre las cuales se homogeneizan las secciones eficaces macroscópicas, como ilustramos en la figura 1.9, y supongamos que la gota ocupa el 5% del volumen de la celda. Para poder avanzar un paso del cálculo cinético-espacial de núcleo debemos asignarle secciones eficaces mascroscópicas a la celda que contiene la pequeña gota de boro, a partir de cálculos paramétricos de nivel de celda en los cuales conocemos cómo varían las secciones eficaces en función de los parámetros termohidráulicos (temperaturas y densidades) y de la concentración de venenos (xenón y boro) de la celda. Como el boro no está uniformemente distribuido, debemos obtener un valor medio que proponemos calcular como un promedio de las concentraciones de boro de la gota y del resto de la celda pesado con los volúmenes relativos. Esta propuesta no conserva ritmos de reacción, pero no hay mejores alternativas dado que existe un único parámetro de boro para toda la celda. Para el caso de la figura 1.9, la concentración media de boro de la celda sería 100 ppm, resultando en una absorción casi negra para toda la celda en lugar de una absorción completamente negra sólo en el 5% del volumen. La alternativa a la dilución geométrica sería homogeneizar de forma tal no de mantener la relación de volúmenes sino los ritmos de reacción. Esto implicaría tener que realizar un nuevo cálculo de celda para cada una de las celdas de la malla de representación para cada instante de tiempo teniendo en cuenta la geometría real de la gota, lo que de hecho está fuera de las posibilidades de las cadenas de cálculo actuales, pero podría llegar a ser un esquema alternativo. Sin embargo, como discutimos más adelante, aún existen otros inconvenientes en la formulación que no pueden ser salvados de esta forma.


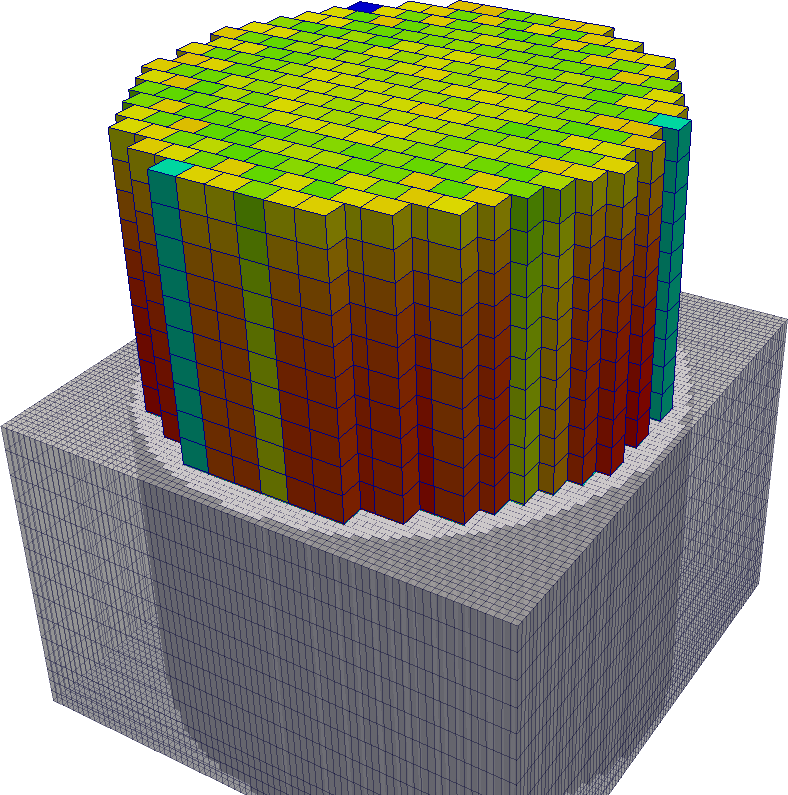
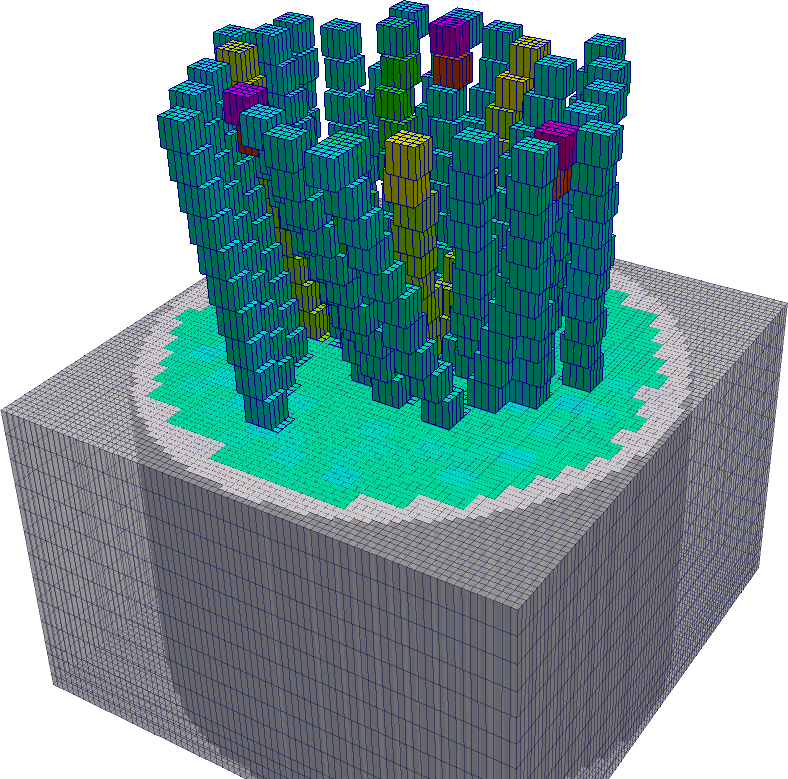
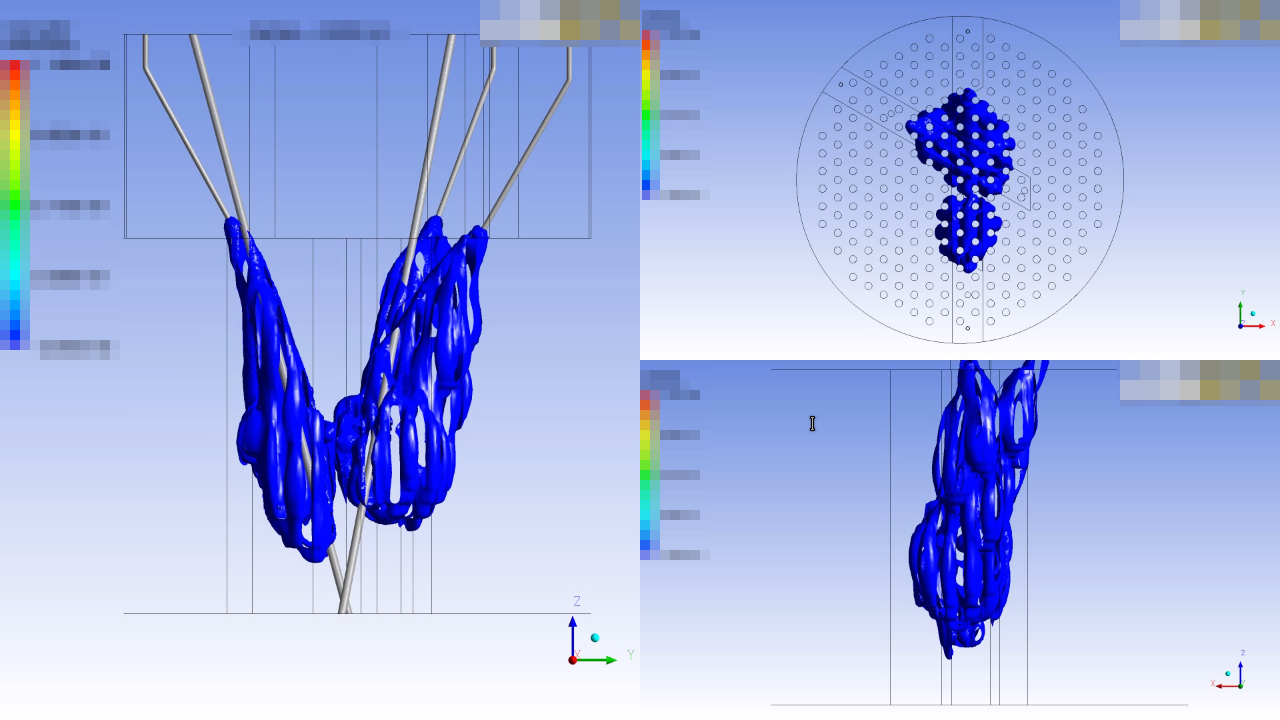
Para reducir este efecto y además poder realizar un estudio de convergencia de malla hemos decidido extender el código de núcleo para permitir que la definición de la distribución instantánea de boro pueda realizarse también sobre la malla de cálculo, en lugar de hacerlo sólo sobre la de representación como el resto de los parámetros (temperaturas, densidades, etc.) [11]. En este caso, a partir de resultados fluidodinámicos es que incorporamos la pluma de boro al esquema de cálculo acoplado mapeando explícitamente (con un código desarrollado ad-hoc) la malla del código CFD (figura 1.10, \sim 4.5 millones de celdas) a la malla de cálculo del código neutrónico (figura 1.11, \sim 200.000 celdas para 4\times 4 \times 20).
Observación. En la Sección 5.1 del capítulo 5 mostramos el enfoque propuesto para tratar mallas no conformes a partir de las lecciones aprendidas. En la Sección B.3.2.2 resolvemos un problema termo-mecánico usando el mismo esquema.
1.2.10 Celdas refinadas
Dado que el efecto de dilución de secciones eficaces macroscópicas se reduce drásticamente con el tamaño de la celda, hemos realizado estudios de convergencia de malla [17] con el doble objetivo de estimar los errores cometidos y para extrapolar las reactividades obtenidas a una discretización espacial infinitesimal. Sin embargo, hemos encontrado que no siempre es conveniente trabajar con mallas de cálculo neutrónico demasiado finas. En la figura 1.12 mostramos el resultado de mapear una cierta distribución de concentración de boro para dos mallas de cálculo similares, una con 40 celdas axiales y otra con 60. Debido a que el cálculo CFD se realiza sobre una malla no estructurada, ésta se ha diseñado de forma tal de ser más refinada en ciertas ubicaciones de interés dentro del tanque del moderador. En algunas zonas donde esta malla es más gruesa, sucede que las celdas de CFD son más grandes que las celdas de cálculo neutrónico. El resultado es que, para mallas neutrónicas demasiado finas, pueden quedar algunas celdas sin tener asignada una concentración de boro ya que todo el boro de la celda CFD podría asignarse a una celda neutrónica vecina. De esta manera, a partir de un cierto tamaño de malla neutrónica, si bien se disminuye el efecto de la dilución de secciones eficaces sucede que en forma numérica se remueve boro del tanque del moderador. Estos dos efectos tienen consecuencias opuestas, y su magnitud no es fácil de evaluar. Una alternativa para paliar este problema sería plantear un método de conversión entre la celda de CFD y la de cálculo neutrónico que tenga en cuenta estos casos particulares. Sin embargo, como discutimos más, aún existen otros inconvenientes en la formulación que no pueden ser salvados de esta forma.

En la figura 1.10, podemos observar que la nube de boro calculada en la malla de CFD avanza sólo en el tanque del moderador. Es decir, los canales individuales forman parte de la frontera del dominio fluidodinámico. En la malla neutrónica, los canales están embebidos en un arreglo de paralelepípedos que no son capaces de reproducir su geometría cilíndrica. En efecto, en la figura 1.13 ilustramos este concepto suponiendo que el frente de la pluma de boro hace contacto con un canal refrigerante. Al homogeneizar geométricamente, la celda 1 tendrá asignada una concentración de boro c_{b1} = 1000~\text{ppm} ya que se encuentra en su totalidad dentro de la nube. Las celdas 2 y 3 tendrán alguna cierta concentración de boro entre 0 y 1000 ppm. Estas celdas sufrirán en alguna medida el efecto de dilución de secciones eficaces ya discutido. Pero la situación en la celda 4 es más compleja aún, porque la concentración c_{b4} asignada supone que todo el volumen de la celda está compuesto por moderador, cuando la mayor parte consiste en una mezcla de combustible y refrigerante. Más aún, el hecho de que la concentración c_{b1} sea diferente de la nominal (i.e. c_b=0) hará que el código de núcleo modifique todas las secciones eficaces macroscópicas de la celda 1, incluso las relacionadas a la fisión cuando en realidad no hay materiales fisibles ni fisionables en ella por el simple hecho de tener secciones eficaces macroscópicas homogeneizadas teniendo en cuenta una celda con “un poco de combustible y un poco de moderador”.
1.2.11 Neutrones difundidos
Tanto el código neutrónico de núcleo empleado en el esquema acoplado propuesto para actualizar los transitorios del Capítulo 15 del FSAR de Atucha I ilustrado en la figura 1.4 como el código utilizado por los expertos internacionales para estudiar la inyección de boro durante el licenciamiento de Atucha II resuelven la ecuación de difusión de neutrones a dos grupos de energía. En esta formulación, se supone que la corriente neta de neutrones es proporcional al gradiente del flujo escalar a través de un cierto coeficiente de difusión. Esta ecuación es una aproximación que podemos deducir a partir de la ecuación de transporte de neutrones (de hecho la deducimos matemáticamente en esta tesis en la Sección 2.4). La validez de la aproximación es tanto mejor mientras más ciertas sean las famosas seis suposiciones de la página 125 del libro clásico de Lamarsh [4]:
- el medio es infinito
- el medio es uniforme, de forma tal que todas las secciones eficaces son constantes, independientemente de la posición
- no hay fuentes de neutrones
- el scattering7 es isotrópico en el sistema de coordenadas del laboratorio8
- el flujo neutrónico es una función levemente dependiente de la posición
- el flujo neutrónico no es un función del tiempo.
Si bien estas hipótesis pueden ser relajadas y aún así poder suponer que la corriente neta de neutrones es proporcional al gradiente del flujo escalar, esto deja de ser cierto en presencia de materiales muy absorbentes. Este hecho es especialmente importante cuando hay interfaces entre materiales en donde se dan grandes discontinuidades en las secciones eficaces, que es justamente el objetivo de la evaluación del segundo sistema de extinción: el avance de una pluma de un absorbente neutrónico (ácido deuterobórico) a través de un medio difusivo (el agua pesada contenida en el tanque del moderador).
En el capítulo 2 derivamos primeramente la ecuación de transporte de neutrones a partir de la conservación de neutrones. Luego derivamos la ecuación de difusión a partir de la de transporte y mostramos detalladamente las razones matemáticas de las aproximaciones necesarias para llegar a la ley de Fick para neutrones. Pero este enfoque solamente involucra aproximaciones del orden de “el cociente a/b \ll 1” o “despreciando términos de orden superior” sin tener parámetros numéricos para su evaluación. La implicación física de estas suposiciones y aproximaciones solamente puede ser evaluada resolviendo un mismo problema con las dos ecuaciones y evaluando la diferencia obtenida en las soluciones. Este es justamente uno de los aportes de esta tesis de doctorado.
La condensación y homogeneización de secciones eficaces que realiza el código de celda tiende a reducir las variaciones espaciales propias de configuraciones heterogéneas de los núcleos de los reactores nucleares. Pero tal como hemos discutido, para reducir los efectos de la dilución del boro es necesario reducir los tamaños de las celdas de cálculo. Esta solución, además de no ser completamente efectiva para contrarrestar la demasiada inserción de reactividad negativa, configura una situación en la cual la ecuación de difusión deja de ser válida. En particular, las condiciones 2 y 5 dejan de cumplirse y no sólo no podemos evaluar la magnitud sino que ni siquiera podemos conocer el signo del error cometido.
1.3 Limitaciones de la formulación actual
El enfoque propuesto para evaluar la efectividad del segundo sistema de apagado de un reactor tipo Atucha involucra los siguientes pasos:
Realizar un cálculo tipo CFD para obtener la distribución espacio-temporal de concentración de ácido deuterobórico sobre una malla detallada teniendo en cuenta la geometría de
- el tanque del moderador
- los canales combustibles
- los tubos guía de barras de control
- las lanzas de inyección de boro
Convertir dicha distribución a una malla estructurada para que esa información pueda ser tenida en cuenta por las herramientas neutrónicas disponibles.
Calcular la dependencia de las secciones eficaces macroscópicas del moderador en función de la concentración de boro compatibles con la aproximación de difusión.
Realizar un cálculo de difusión de neutrones a nivel de núcleo tomando la información obtenida en los puntos 2 y 3 como entrada.
Tanto la metodología como los estudios propiamente dichos han sido aprobados por la Autoridad Regulatoria Nuclear para su aplicación a Atucha I y, de hecho, es en varios aspectos técnicos superior al implementado por expertos internacionales para Atucha II. Sin embargo, esta metodología presenta al menos tres inconvenientes:
Una malla de cálculo neutrónico muy gruesa con respecto a la malla de CFD produce una dilución de secciones eficaces absorbentes que hace que se sobrestime la reactividad negativa introducida por el boro, aunque un refinamiento excesivo de la malla de cálculo neutrónico remueve boro numéricamente en forma espuria introduciendo un efecto opuesto.9
Los canales no se pueden representar en forma satisfactoria con un malla de cálculo neutrónico estructurada basada en paralelepípedos, y para tamaños de celda menores a la mitad de la distancia entre canales el código termina modificando secciones eficaces de fisión homogeneizadas en función de la concentración de boro en ubicaciones donde no hay combustible sino sólo moderador.
No se cumplen enteramente las condiciones de validez de la ecuación de difusión de neutrones, por lo que el cálculo neutrónico de núcleo tiene una incerteza demasiado grande.
Aún cuando es posible que los resultados de ingeniería obtenidos sean suficientemente exactos y precisos, no es posible determinar cuantitativamente dicha exactitud y precisión si no se dispone de un método objetivamente más exacto y preciso contra el cual poder comparar los resultados.
1.4 Las propuestas de esta tesis
La motivación fundamental de esta tesis parte del tercer punto de la sección anterior, y luego continúa subiendo hacia los otros dos puntos, encadenando varias ideas en un mismo hilo conductor: desarrollar una herramienta objetivamente más precisa para poder verificar la precisión y exactitud de las aproximaciones involucradas en cálculos neutrónicos a nivel de núcleo.
Está claro que resolver una formulación de la ecuación de transporte basada en el método de ordenadas discretas S_N arroja resultados más precisos que la ecuación de difusión. Ahora bien, el principal problema de S_N es que el tamaño del problema discretizado escala como el producto de
- la cantidad de grupos de energía (Sección 3.2),
- la cantidad N \cdot (N+2) de direcciones de vuelo de los neutrones en la formulación S_N (Sección 3.3),
- la cantidad de incógnitas espaciales, es decir el número de nodos o celdas de la malla espacial (Sección 3.4),
A su vez, los recursos computacionales necesarios para resolver el problema, esencialmente tiempo de procesador y memoria, escalan con una velocidad más que lineal con el producto de los tres puntos mencionados, usualmente entre O(n \log n) y O(n^2). Esto hace que para casos con mallas de interés de ingeniería sea imposible emplear una única computadora digital para resolver el problema. En efecto, aún cuando un tiempo de procesamiento arbitrariamente grande pueda ser aceptado desde un punto de vista de gerenciamiento de proyectos, la escala de la memoria requerida no permitiría la flexibilidad suficiente para realizar los estudios de convergencia de malla, de energía y de direcciones necesarios para estudiar la verificación tanto de la herramienta de transporte por S_N en sí como de la comparación con formulaciones más simplificadas basadas en difusión. Es necesario entonces diseñar un esquema numérico de resolución de ecuaciones diferenciales que pueda escalar con el tamaño del problema a resolver. Es decir, la memoria le impone un límite técnico al proyecto. Para ello, la herramienta computacional utilizada en el proyecto debe ser paralelizable, flexible y extensible:10
\text{difusión} \rightarrow \text{muy simplificado} \Rightarrow S_N \rightarrow \text{escala muy rápido} \Rightarrow \text{esquema} \begin{cases} \text{paralelizable} \\ \text{flexible} \\ \text{extensible} \end{cases}
- Paralelizable
-
de forma que el problema se pueda resolver con un cierto número de computadoras digitales trabajando en conjunto de forma tal que los recursos computacionales (esencialmente la memoria) sean suficientes para que cada una de estas computadoras pueda tratar una parte del problema.
Una condición necesaria para poder implementar este tipo de paralelización es poder dividir el dominio espacial de forma tal de minimizar la cantidad de información que deben compartir cada una de las computadoras con el resto. Esto implica resolver un problema de descomposición de dominio (DDM) que involucra teoría de grafos (DAG), lo que a su vez necesita la topología explícita de la malla.
Este requerimiento concuerda con la necesidad de utilizar mallas no estructuradas para poder modelar geometrías complejas en reactores PHWR, a saber
- moderador separado de refrigerante en canales circulares
- barras de control inclinadas
- lanzas de inyección de boro inclinadas
- plumas de ácido deuterobórico transitorias no triviales
Las mallas no estructuradas incluso permiten también
- modelar reactores de investigación sin sufrir el “efecto escalera” de la figura 1.6 (c)
- evitar efectos numéricos tales como la dilución de secciones eficaces en los extremos de las barras de control
- facilitar la resolución de problemas tipo benchmark en geometrías cilíndricas o esféricas
- resolver problemas abstractos tales como dominios con forma de conejo o una transición entre un cubo y una esfera
- utilizar la misma malla para CFD y para neutrónica
- Flexible
-
en el número de computadoras a utilizar dependiendo del tamaño del problema y en la forma de definir tanto la entrada como la salida de datos, haciendo especial énfasis en la necesidad de trabajar en entornos de nube pública.
Un problema de tamaño arbitrario en principio requeriría una cantidad también arbitraria de computadoras para ser resuelto. Una herramienta computacional diseñada para correr en un cluster de cálculo de tamaño fijo no cumpliría esta condición, por lo que debe ser posible explotar la oferta de servidores públicos en la nube. Luego la herramienta computacional debe ser diseñada desde el comienzo para operar en la nube (i.e. cloud-first) en lugar de que sea solamente “posible” su ejecución en la nube (i.e. cloud-friendly). Hay sutiles pero importantes diferencias entre estos dos conceptos, discutidos en la Sección 4.4.6, tales como
- necesidad de proveer una interfaz pública tipo RESTful API
- capacidad de definir, lanzar y post-procesar cálculos con interfaces web
- posibilidad de reportar el estado del cálculo y, eventualmente, errores en forma remota
- Extensible
-
para poder modificar o agregar modelos matemáticos que eventualmente ayuden a mejorar la calidad, precisión y exactitud de los resultados obtenidos.
Está claro que teniendo acceso al código fuente de una herramienta computacional, en principio siempre es posible modificar y/o agregar nuevas formulaciones y/o modelos matemáticos. Sin embargo, el concepto de extensibilidad implica que se hayan tenido en cuenta posibles mecanismos de extensión en el diseño de la arquitectura del código de forma tal que el esfuerzo necesario para lograr extender la funcionalidad sea razonable. Más aún, bajo el espíritu académico de un trabajo de doctorado, la herramienta debe calificar como software libre en el concepto de la Free Software Foundation de forma tal de que cualquier investigador o profesional pueda modificarla y/o extenderla para poder resolver problemas planteados como ecuaciones diferenciales parciales de la mejor manera posible.
La propuesta de esta tesis es entonces desarrollar una herramienta computacional que esencialmente satisfaga estas condiciones. Es por eso que:
Los esquemas numéricos desarrollados a lo largo del Capítulo 3 para resolver las ecuaciones de transporte y difusión de neutrones introducidas en el capítulo 2 se basan en formulaciones basadas en elementos finitos, que son intrínsecamente compatibles con mallas no estructuradas.
Tal como discutimos en la Sección 1.1, el primer requerimiento de la herramienta computacional desarrollada es que sea cloud first. Los apéndices A y B describen los requerimientos y las especificaciones desde el punto de vista de desarrollo de software. En resumen, la herramienta…
es libre y abierta distribuida bajo licencia GPLv3+ (Sección B.1)
sigue la filosofía de programación Unix [7]. Estrictamente hablando es un filtro de Unix que funciona como una función de transferencia (Sección B.1.2) entre
+------------+ mesh (*.msh) } | | { terminal data (*.dat) } input ----> | FeenoX |----> output { data files input (*.fee) } | | { post (vtk/msh) +------------+- uno o más archivos de entrada de texto plano que definen completamente la entrada, y
- cero o más archivos de salida (posiblemente incluyendo
stdout) con los resultados solicitados:
no escribe (y muy probablemente ni siquiera calcule) un resultado si éste no se pide explícitamente como una salida (Sección B.3.2)
los archivos de entrada (Sección B.3.1) deben…
reproducir la estructura de la definición del problema a resolver que haría un profesional humano.
ser simples para problemas simples.
ser parecidos para problemas parecidos.
separar la definición del problema continuo a resolver de la discretización espacial particular utilizada para resolverlo.
permitir una dependencia espacial no trivial de las propiedades de los materiales, por ejemplo
- quemado
- de concentración de venenos neutrónicos
- posición de barras de control
a través de
- expresiones algebraicas, y/o
- funciones definidas por puntos
- a partir de una distribución unidimensional
- definidos sobre una malla con topología explícita
- dispersos en varias dimensiones sin topología
ser amigables con…
- los sistemas de control de versiones distribuidos como Git
- lenguajes de expansión de macros como M4
- interfaces gráficas de usuario, especialmente basadas en web
El capítulo 4 describe en detalle la arquitectura elegida para permitir resolver ecuaciones diferenciales en derivadas parciales arbitrarias con una arquitectura donde existe un framework (ver definición 4.1) general y un esquema de apuntadores a función con entry points particulares para las diferentes ecuaciones a resolver. De hecho las ecuaciones de difusión de neutrones y transporte por el método S_N son casos particulares de otras formulaciones que la herramienta también puede resolver:
- ecuación de Laplace/Poisson (tanto estado estacionario como transitorio)
- conducción de calor (tanto estado estacionario como transitorio, incluyendo conductividad no lineal dependiente de la temperatura)
- elasticidad lineal (sólo estado estacionario)
- análisis modal
La resolución de todas estas ecuaciones en derivadas parciales siguen la misma metodología con respecto al manejo de
- mallas no estructuradas
- expresiones algebraicas
- propiedades de materiales
- condiciones de contorno
- resolución de sistemas de ecuaciones
- lineales
- no lineales
- transitorias
- de autovalores
- escritura de resultados
- generación de archivos de post-procesamiento (VTK, Gmsh)
- evaluación de distribuciones en puntos arbitrarios del dominio
- cálculo de escalares a partir de distribuciones
- integrales sobre el espacio
- cálculo de extremos y valores medios
Todos estos puntos están manejados por un framework de matemática general de la herramienta (definición 4.1). Cada ecuación diferencial particular a resolver debe ser “provista” como un subdirectorio dentro de
src/pdesconteniendo ciertas funciones en C capaces de generar las matrices y vectores elementales de la formulación de la ecuación diferencial según el método de elementos finitos.
Finalmente, el capítulo 5 muestra algunos resultados que no podrían ser obtenidos por herramientas que no tengan al menos una de estas cuatro características distintivas del código desarrollado:
- Filosofía Unix, integración en scripts y simulación programática
- Mallas no estructuradas
- Ordenadas discretas (además de difusión)
- Paralelización en varios nodos de cálculo con MPI
Siguiendo una metodología que apunta a explicitar las especificaciones para reducir las incertezas en cuanto al alcance de proyectos de desarrollo de software industriales, el apéndice A contiene un Software Requirements Specification, que es un documento estándar en la industria del software, ficticio pero razonable que actúa como un pliego de especificaciones técnicas para una herramienta computacional genérica que bien podría haber sido escrito por una entidad pública o privada que necesite realizar cálculos de ingeniería en la nube. El apéndice B contiene el Software Design Specification de la herramienta desarrollada en esta tesis, que es el documento que de alguna manera “resuelve” las especificaciones del SRS con una propuesta en particular. Este apéndice actúa como una propuesta básica al pliego planteado por el SDS.
Terminada la explicación del por qué (why) pasemos entonces al cómo (how).
En el sentido del inglés offload.↩︎
En el sentido del inglés shuffling.↩︎
En el sentido del inglés core.↩︎
En el sentido del inglés nuclei.↩︎
Del inglés Computational Fluid Dynamics.↩︎
Del inglés directed acyclic graph.↩︎
El término castellano “dispersión” nos parece menos apropiado que el original en inglés scattering.↩︎
De la planta o la central serían mejores términos para el caso tratado en este trabajo.↩︎
Estrictamente hablando este efecto puede ser corregido, pero el problema de la escalabilidad persiste.↩︎
El símbolo \rightarrow quiere decir “implica” y el símbolo \Rightarrow quiere decir “luego se necesita”.↩︎